Slideshow:
Overview
We will estimate the # tuples in the following σ expressions
A is an attribute and c is a constant value
Estimating the size of the result of
σA = c(R)
Estimating the size of the result of
σA ≠ c(R)
Estimating the size of the result of
σA < c(R)
Estimating the size of the result of
σA > c(R)
Estimating the size of the result of
σC1 and C2(R)
Given that:
Problem: estimate the size of B( σC1 and C2(R) ) and T( σC1 and C2(R) )
Estimating the size of the result of
σC1 and C2(R)
-
Simplifying Assumption
Given that:

Estimating the size of the result of
σC1 and C2(R)
Given that:
If C1 and C2 are statistically independent then: Probab( C1 and C2 ) = Probab(C1) × Probab(C2)
Estimating the size of the result of
σC1 and C2(R)
- Example
Estimating the size of the result of
σC1 and C2(R)
- Counter example
If C1 and C2 are not statistically independent, then do not apply this result !!
Example: a = 10 and a > 20
Estimating the size of the result of
σC1 or C2(R)
Given that:
Problem: estimate the size of B( σC1 or C2(R) ) and T( σC1 or C2(R) )
Mathematical pre-requisite
Converting σC1 or C2(R) into an equivalent expression using AND conditions:
Logic law: not (C1 or C2) ≡ ( (not C1) and (not C2) )
Therefore:
Estimating the size of the result of
σC1 or C2(R)
-
Simplifying Assumption
Given that:
Estimating the size of the result of
σC1 and C2(R)
Given that:
Previously, we have derived this equality:
Therefore: (applying statistical indepencence of ¬C1 and ¬C2)
Estimating the size of the result of
σC1 and C2(R)
- Example
- Cases that we will study:
- σ A = c (R)
- σ A < c (R)
- σ
C1 and C2
(R)
- σ C1 or C2 (R)
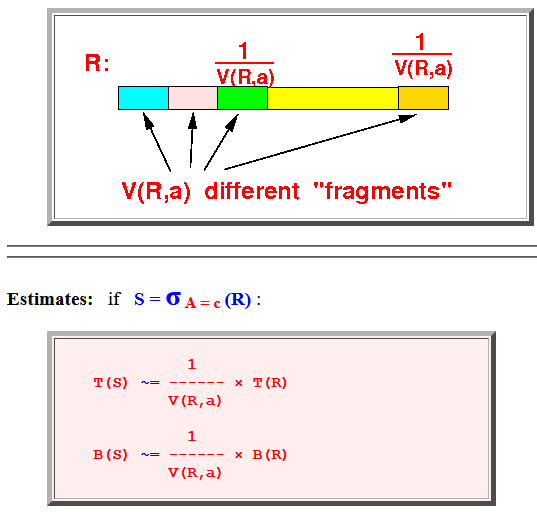
- Situation:
- Estimates: if
S = σ
A = c
(R)
:
1 T(S) ~= ------ × T(R) V(R,a) 1 B(S) ~= ------ × B(R) V(R,a)
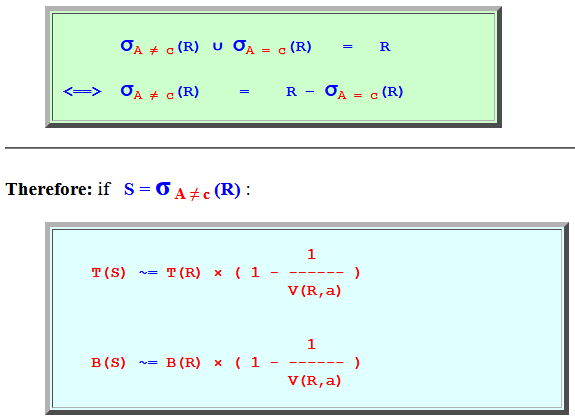
- Fact:
σA ≠ c(R) ∪ σA = c(R) = R <==> σA ≠ c(R) = R − σA = c(R)
Therefore: if S = σ A ≠ c (R) :
1 T(S) ~= T(R) × ( 1 - ------ ) V(R,a) 1 B(S) ~= B(R) × ( 1 - ------ ) V(R,a)
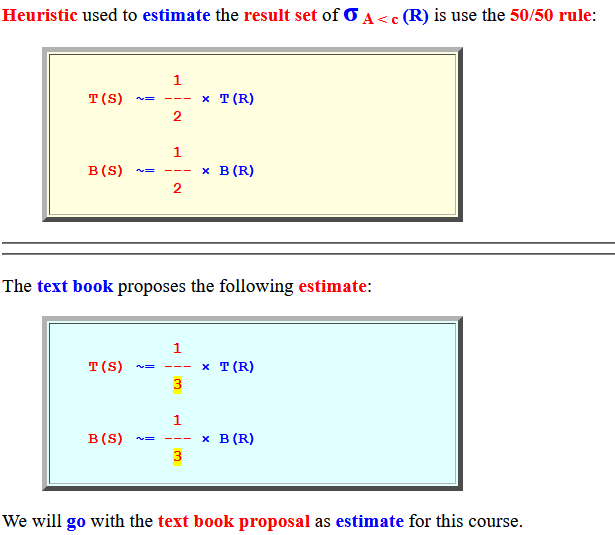
- Heuristic
used to estimate the
result set
of σ
A < c
(R)
is use the 50/50 rule:
1 T(S) ~= --- × T(R) 2 1 B(S) ~= --- × B(R) 2
- The text book proposes the
following
estimate:
1 T(S) ~= --- × T(R) 3 1 B(S) ~= --- × B(R) 3We will go with the text book proposal as estimate for this course.
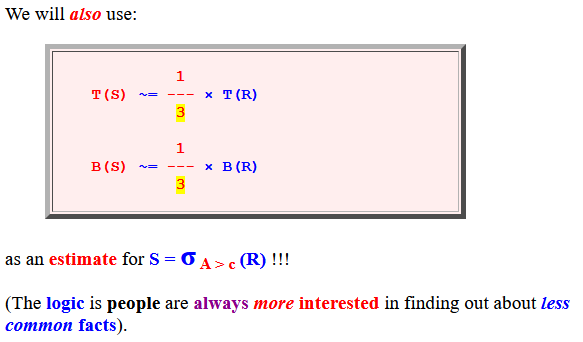
- We will also
use:
1 T(S) ~= --- × T(R) 3 1 B(S) ~= --- × B(R) 3as an estimate for S = σ A > c (R) !!!
(The logic is people are always more interested in finding out about less common facts).
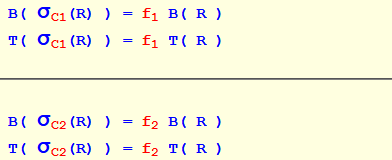
- Given:
B( σC1(R) ) = f1 B( R ) T( σC1(R) ) = f1 T( R )
B( σC2(R) ) = f2 B( R ) T( σC2(R) ) = f2 T( R )
-
Simplifying
assumption:
- The conditions C1 and C2 are (statistically) independent
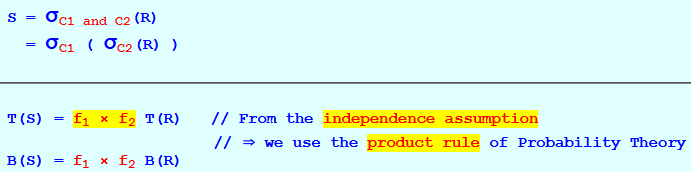
- Then:
S = σC1 and C2(R) = σC1 ( σC2(R) )
T(S) = f1 × f2 T(R) // From the independence assumption // ⇒ we use the product rule of Probability Theory B(S) = f1 × f2 B(R)
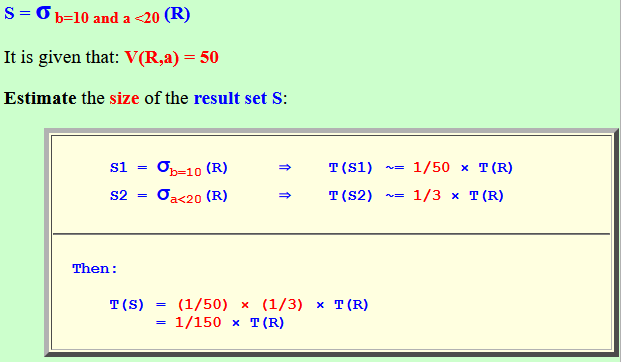
- Example:
- S =
σ
b=10 and a <20
(R)
It is given that: V(R,a) = 50
Estimate the size of the result set S:
S1 = σb=10(R) ⇒ T(S1) ~= 1/50 × T(R) S2 = σa<20(R) ⇒ T(S2) ~= 1/3 × T(R)
Then: T(S) = (1/50) × (1/3) × T(R) = 1/150 × T(R)
- S =
σ
b=10 and a <20
(R)
- Warning:
use common sense when you
apply any
rule !!!
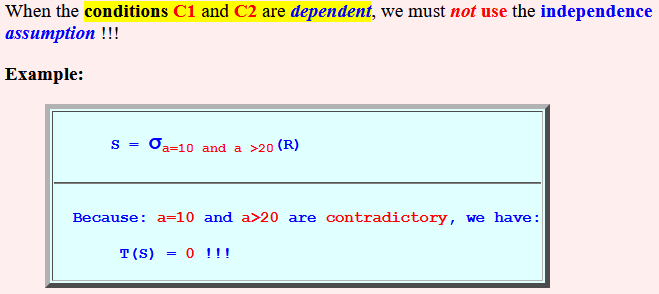
- When the
conditions
C1 and
C2 are
dependent,
we must
not use the
independence assumption !!!
Example:
S = σa=10 and a >20(R)
Because: a=10 and a>20 are contradictory, we have: T(S) = 0 !!!
- When the
conditions
C1 and
C2 are
dependent,
we must
not use the
independence assumption !!!
- Given:
B( σC1(R) ) = f1 B( R ) T( σC1(R) ) = f1 T( R )
B( σC2(R) ) = f2 B( R ) T( σC2(R) ) = f2 T( R )Problem:
- What is the size of B( σ C1 or C2(R) ) (and T( σ C1 or C2(R) )) ???
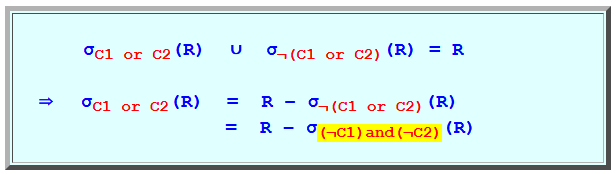
- Preparatory step:
σC1 or C2(R) ∪ σ¬(C1 or C2)(R) = R ⇒ σC1 or C2(R) = R − σ¬(C1 or C2)(R) = R − σ(¬C1)and(¬C2)(R)
- Simplifying
assumption:
- The conditions (¬C1) and (¬C2) are (statistically) independent
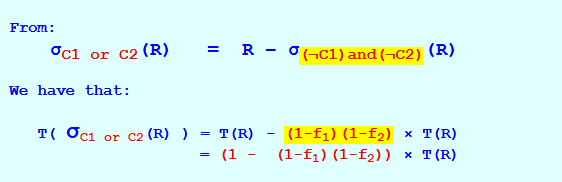
Then:
From: σC1 or C2(R) = R − σ(¬C1)and(¬C2)(R) We have that: T( σC1 or C2(R) ) = T(R) - (1-f1)(1-f2) × T(R) = (1 - (1-f1)(1-f2)) × T(R)
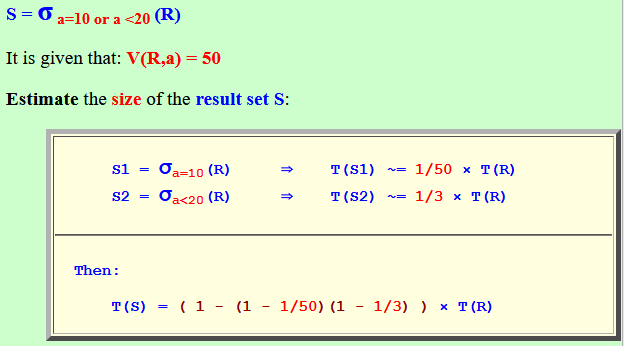
- Example:
- S =
σ
a=10 or a <20
(R)
It is given that: V(R,a) = 50
Estimate the size of the result set S:
S1 = σa=10(R) ⇒ T(S1) ~= 1/50 × T(R) S2 = σa<20(R) ⇒ T(S2) ~= 1/3 × T(R)
Then: T(S) = ( 1 - (1 - 1/50)(1 - 1/3) ) × T(R)
- S =
σ
a=10 or a <20
(R)